Микроконтроллеры
Подключение энкодера к микроконтроллеру
- Подробности
- Категория: Микроконтроллеры
- Опубликовано 23.06.2016 12:36
- Автор: Admin
- Просмотров: 3355
В этой статье пойдет речь о энкодере и о том как его подключить к микроконтроллеру. Встретить его можно в таких устройствах как аудиосистемы, стиральные машины, микроволновкой и ряде современных устройств. К примеру в аудиосистемах энкодеры и микроконтроллеры используются для регулировки громкости. Но ладно хватит уже воды, давайте ближе к делу.
Энкодер или как его еще называют датчик угла поворота - представляет собой электромеханическое устройство, которое преобразует положение угла вала в электрический сигнал. Энкодеры делятся на 2 типа абсолютные и инкрементные.
В инкрементных энкодерах при повороте вала формируются импульсы, количество этих импульсов пропорционально углу поворота вала. Если подсчитать эти импульсы то можно узнать угол поворота вала энкодера. Если ручка энкодера находится в покое то импульсы не формируются. Такие энкодеры широко применяются в аудио системах и промышленных средствах управления.
Абсолтные энкодеры имеют совершенно другой принцип дейставия, основаная на выдачи уникального кода каждому положению вала. Формирование импульсов происходит когда вал вращается и когда он в покое. Причем информация о текущем положения вала, сохранится даже после прекращения подачи напряжения.
В нашем примере мы подключим инкрементный энкодер с микроконтроллером. Энкодер PEC12 422OF SOO24 который имеет 24 импульса за 1 оборот.

Энкодер имеет 5 выводов, 3 из них это выводы самого энкодера, а другие два это кнопка. У выводов энкодера одни вывод общий а 2 другие сигнальные. Схема подключения ничем не отличается от схемы подключения обычной кнопки. Сигнальные выводы подключаются в портам ввода/вывода микроконтроллера. А общий вывод котоый посередине соединяется к земле. С целью защиты от дребезга контактов можно добавить конденсаторы емкостью несколько нФ. Выводы к которым мы подключили энкодер настраиваем в программе как входы и включаем подтягивающие резисторы, можно подключить внешние резисторы.
Схема подключения энкодера к микроконтроллеру
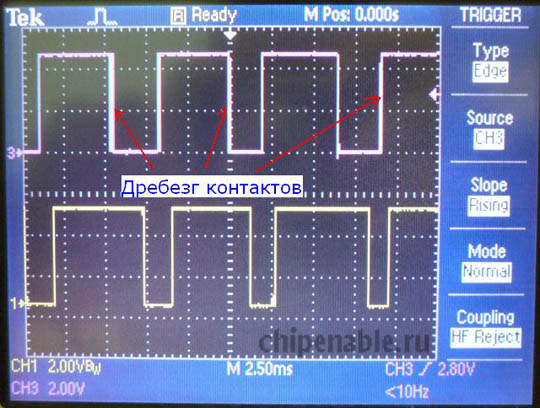
Принцип действия энкодера основан на замыкании и размыкании контактов, когда ручку никто не крутит то на входе в МК имеется логическая еденица. Когда ручку начинают поворачивать то появляются два прямоугольных импульса которые сдвинуты друг относительно друга. От того в какую сторону крутим будет зависить какой сигнал опережает.

Но так как имеется друбезг контактов в любых картина будет выглядить следующим образом.
Алгоритм работы программы микроконтроллера
С определенным интервалом начинается вызов функции опроса энкодера. Эта функция считывает логические уровни, которые присутсвуют на выводах микроконтроллера и производит запись этого значения во временную переменную. Внутри функции опроса энкодера существует другая статичная переменная которая сохраняется при выходе из этой функции в ней хранится последовательность предыдуших значений. Из этой переменной берется последнее записанное значение и сравнивается с текущим для того чтобы определить были ли изменения. Если эти значения равны тот происходит выход из функции, а если они отличаются то значение статичной переменной сдвигается на 2 разряда влево и в "свободное" место записывается новое (текущее) значение.
Получается что когда вал энкодера вращается то во временную переменную будет постоянно записываться новое значение и получится повторяющаяся кодовая последовательность. Если вращаем вправо булед : 11100001, а если влево то 11010010. По этим значениям можно понять в какую сторону крутится вал.
В архиве есть 2 файла encoder.h и encoder.c. Изначалоно нужно задать порт и номер выводов к которым производится подключение это переменные LEFT_SPIN и RIGHT_SPIN. В файле "c" находится реализация функций.
- void InitEncoder(void) - фукнция которая инициализирует выводы;
- void PollEncoder(void) - функция опроса энкодера, если есть вращение то пишем значение в функцию, если нет то просто выходим из функции так как нам нечего тут делать;
- unsigned char GetStateEncoder(void) - переменная возвращает содержимое буфера и очищает его.
Вызов функции опроса энкодера происходит с частототй в 4 кГц. Если опрашивать с меньшей частотой то МК может пропустить импульсы в случае быстрого вращения вала.
Исходник программы под микроконтроллер
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа